This week’s robotics challenge focuses on ultrasonic sensors and will enhance your programming skills by utilizing pre-existing code.
The true way to get good at something is to PRACTICE. I designed the robotics challenge to help you practice basic skills in an applied way.
Program an Ultrasonic Sensor: Have a Solution? Share Your Work!
Use #learnrobotics #roboticschallenge in your Facebook, Twitter, or Instagram post!
I want these challenges to be as interactive as possible, so if you include #review with your post, I will provide personal feedback on your solution.
Challenge Overview
You’re given three ultrasonic sensors and one Arduino Uno with necessary wiring used to prevent a 2WD mobile robot from driving into an obstacle. The motor control methods have already been written (and working 😛 ) and can be called using the following commands:
forward(motorName, duration); //forward for the specified motor & duration backward(motorName, duration); //backward for the specified motor & duration left(); //90-deg turn left right(); //90-deg turn right stop(motorName); //stop motor in current position
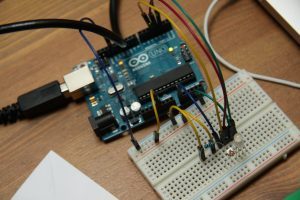
Here’s the current hardware configuration of the device.
[amazon box=”B01JG09DCK,B008GRTSV6″ template=”list”]Your Task
In this week’s robotics challenge, create a method, int avoidObstacles(int ultrasonicPin, int distance) in an Arduino-C program to prevent the robot from crashing into an obstacle using the ultrasonic sensors. You should be at least 3 inches away from the obstacle while running. You do not need to use all of the sensors. The purpose is to configure them appropriately to solve the issue.
Here’s a template to help you get started on a solution:
/* GLOBAL DEFINITIONS
* Define your global variables here.
*/
//left ultrasonic
const int leftULTRATRIG=3; //pin on Digital port 3
const int leftULTRAECHO=2;
//right ultrasonic
//FILL THIS OUT
//center ultrasonic
//FILL THIS OUT
/* REQUIRED METHOD
* Configure your pins as inputs or outputs here.
*/
void setup(){
//*** ultrasonics ***
//*** motors ***
//Setup Channel A - Right Side
pinMode(12, OUTPUT); //Initiates Motor Channel A pin
pinMode(9, OUTPUT); //Initiates Break Channel A pin
//Setup Channel B - Left Side
// FILL THIS OUT
}
/* Input Parameters: const int ultrasonicPin, int inputDistance
* Return Statement: bool
* Determines if the given ultrasonic sensor is within the given distance.
* Returns TRUE if the sensor is <= to input distance * Returns FALSE if the sensor is >= to input distance
* Use case: avoidObstacles(ultrasonicPin, inputDistance)
*/
bool avoidObstacles(const int ultrasonicPin, int inputDistance){
// fill this out
}
// OPTIONAL: Create additional helper methods here.
/* REQUIRED METHOD
* This method is like "main." Loops forever.
* The following comments are things to consider
* when determining your solution.
*/
void loop(){
// CHECK TO SEE IF THERE'S AN OBSTACLE WITHIN 3IN OF THE LEFT SIDE
// BACK UP & TURN IN THE OPPOSITE DIRECTION
// CHECK TO SEE IF THERE'S AN OBSTACLE WITHIN 3IN OF THE RIGHT SIDE
// BACK UP & TURN IN THE OPPOSITE DIRECTION
// CHECK TO SEE IF THERE'S AN OBSTACLE WITHIN 3IN OF CENTER
// BACK UP & TURN LEFT OR RIGHT
}
This template is provided as a GUIDELINE. You do not need to use it in your solution, as there are many ways to solve this problem.
It’s there if you need a quick nudge in the right direction. As always, if you’re really stuck, feel free to ask a question below or Tweet Us (@learnroboticsx) for help!
Not sure how this works?
Get the Robotics Engineering Bundle and learn how to interface electronics, software, and sensors to create autonomous devices and robots.
[products ids=”49200, 49202, 293734″ columns=”3″ orderby=”id”]